I'm pursuing a Master's Degree in Electrical and Computer Engineering at the University of Illinois at Urbana-Champaign, where I also completed my undergraduate degree in Electrical Engineering.
I have 4 summers of internship experience spanning the electronics ecosystem. My first two summers were spent at NextFlex, an R&D institute advancing hybrid electronics for healthcare, aerospace, defense, and automotive industries. My third summer was at Texas Instruments as an Applications Engineering Intern on the Clocks and Timing Systems team. Most recently, I interned at NVIDIA as a PCIe Architecture Intern.
Outside of my internships, I balance academics with real-world practicum — serving as a teaching assistant and conducting research. I'm currently developing low-cost small UAV sensing hardware at Guardian RF, where our technology placed 2nd out of 115 participants at the Department of Defense's CUAS Low-Cost Sensing Challenge.
This breadth gives me a unique perspective across the electronics ecosystem — from R&D through commercialization, and across abstraction levels from silicon all the way to systems.
Career
Professional Experience
Guardian RF (YC S24)
Hardware/Software Engineering Intern (Part-time)
December 2024 — Present
Developing hardware and software for drone detection and tracking.
NVIDIA
PCIe Architecture Intern
May 2025 — August 2025
Researched architecture-level improvements for PCIe IP.
Texas Instruments
Applications Engineering Intern
May 2024 — August 2024
Developed software(internal and external) and hardware to support Clocks and Timing Systems team.
Performed measurement and analysis of customer silicon configurations
NextFlex
Hybrid Electronics Fabrication Intern
May 2023 — August 2023
Designed, fabricated, and integrated custom sensors and low-GHz antennas.
Developed embedded and host software for automated testing framework for proprietary embedded systems.
Trained and deployed small DNN model for gesture recognition on edge MCU
Electrical Engineering Intern
May 2022 — August 2022
Developed custom hardware an integrated it into an automated MCU testing and programming workflows, improving testing efficiency and reliability.
Designed embedded control systems for UAVs and robotics with BLE interfaces, leveraging simulation and hardware-in-the-loop testing to validate real-time performance.
Work
Projects
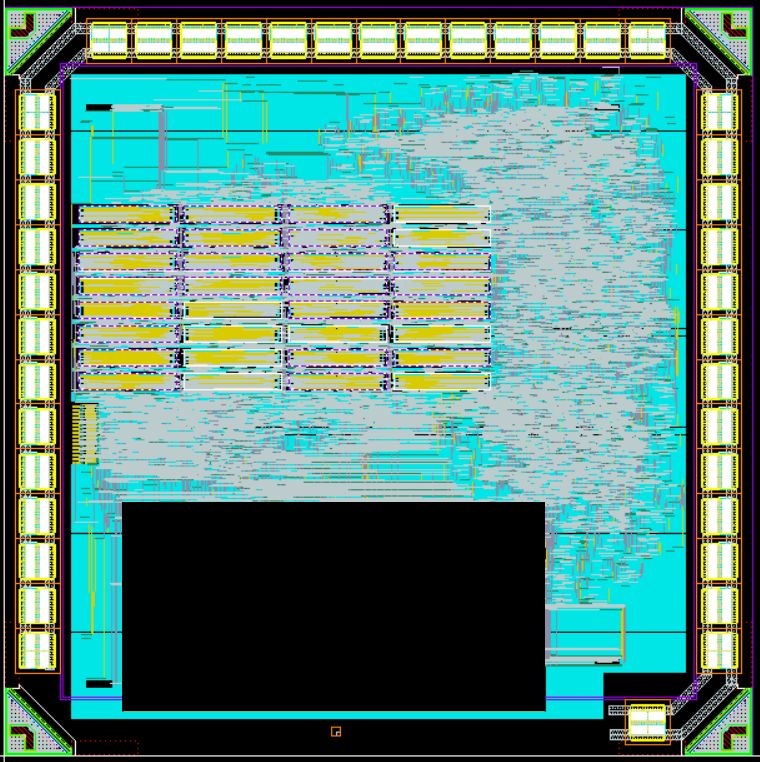
ECE 427 · Aug–Nov 2025
Digital Random Number Generator IC
Designed and taped out an RNG integrated circuit in TSMC 65nm. Responsible for schematic, layout, and simulation of a calibratable StrongARM latch-based entropy source, chip debug architecture, and final integration.
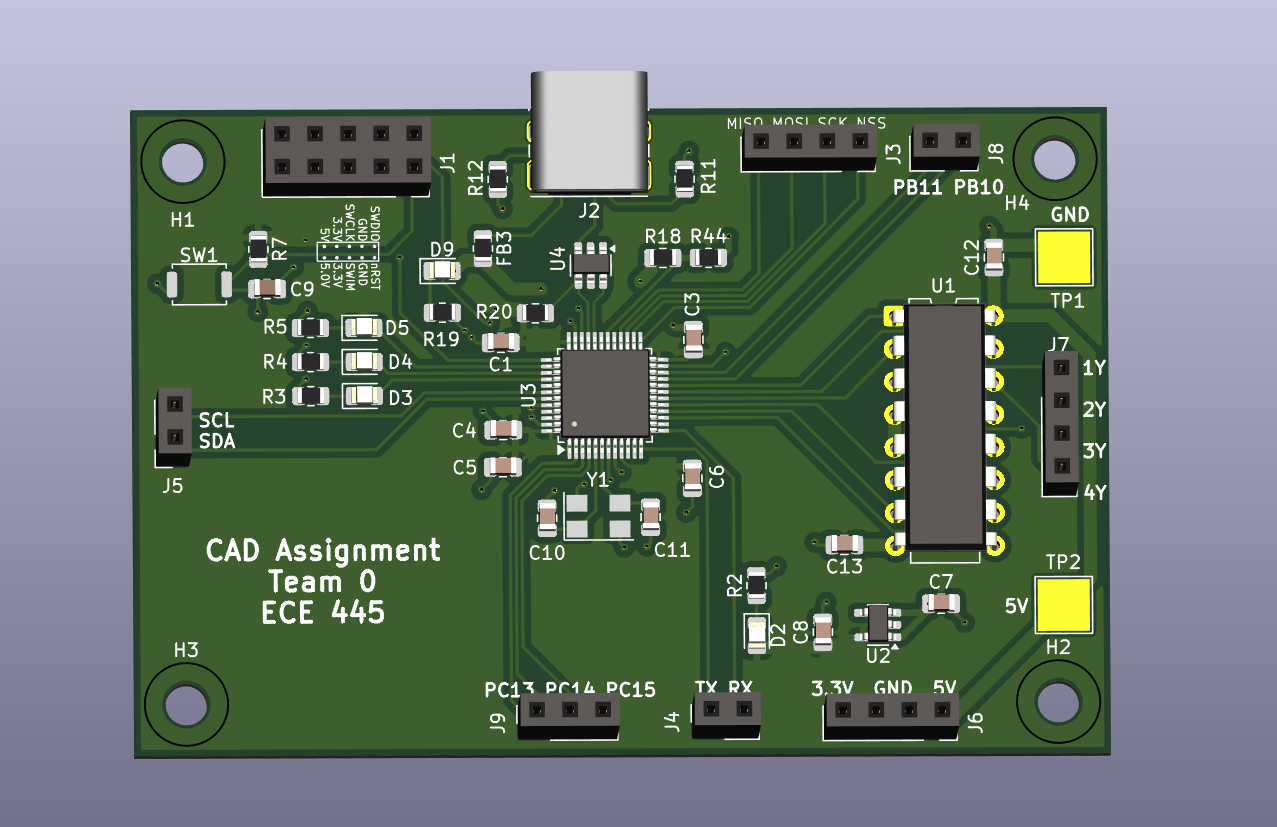
Guided 6 teams of 2–3 senior ECE students from ideation to demonstration. Redesigned the PCB intro lab from ATMega to STM32, adding H-bridge, communication protocols, and expanded GPIO.
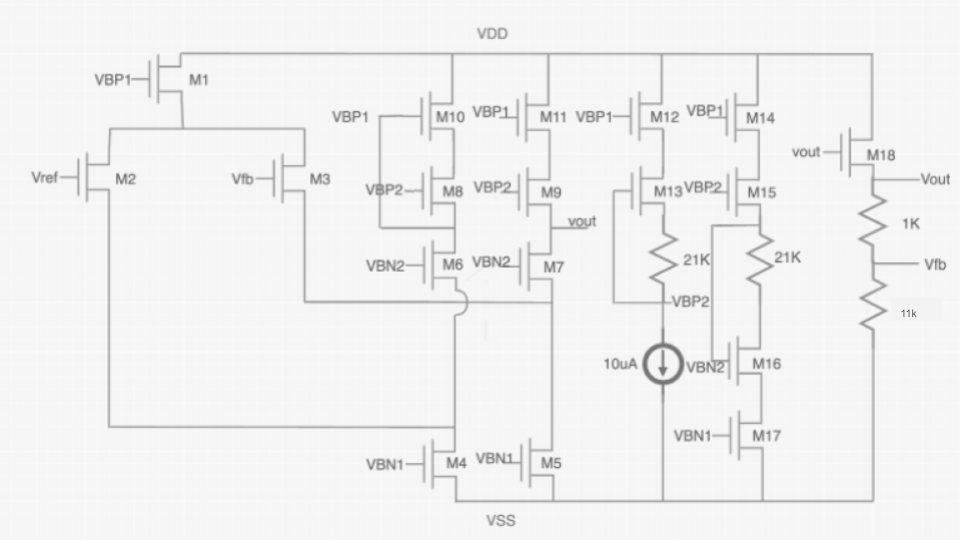
Final project for Analog IC Design. Made topological and device sizing decisions to meet input/output voltage, load/line regulation specs while minimizing quiescent current using Cadence Virtuoso and Spectre.
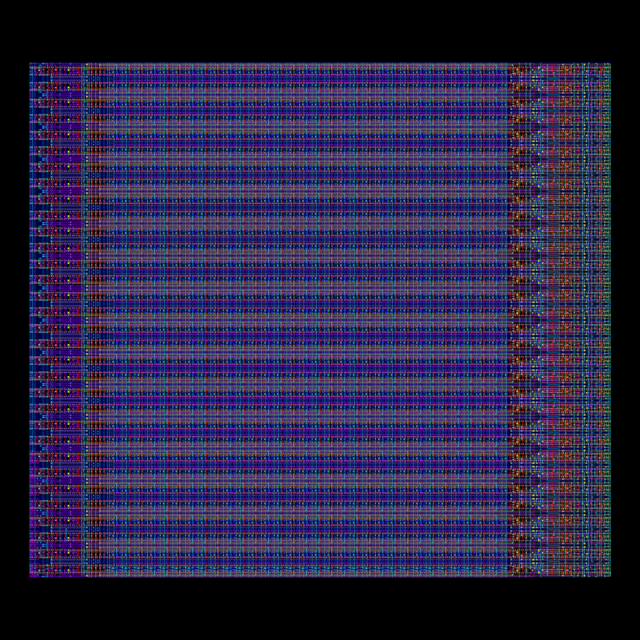
Designed the smallest bitsliced RV32I datapath (no shifter) from transistor level — placing top 5 of 100+ students. Deepened understanding of standard cells, routing, and IC abstraction levels.
IC LayoutRISC-VCadence Virtuoso
Computational Imaging Group · Jan–Dec 2024
FMCW mmWave Radar Research
In Prof. Minh Do's group: Dockerized codebase, migrated ROS to ROS 2, converted Python to C++ for improved performance. Developed real-time visualizations using DSP on TI IWR1443BOOST + DCA1000EVM.
Designed a cryptographically secure remote access system using Schnorr Identification Protocol to eliminate replay, relay, and rolling jam attacks. Won Instructor's Award among 45 teams.
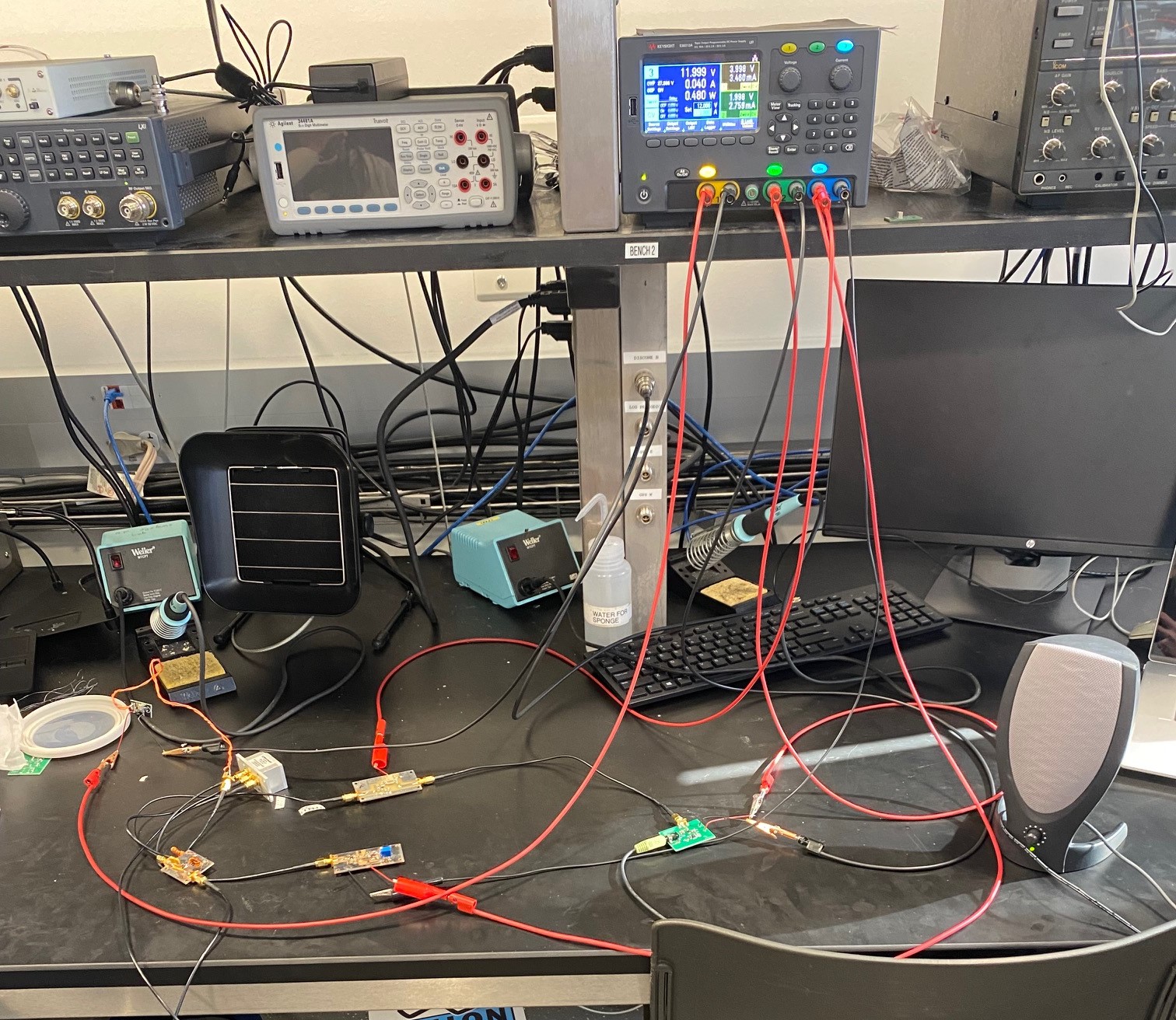
Designed and assembled a full FM transceiver system from individual RF building blocks — oscillator, mixer, modulator, demodulator, filter, amplifier, and matching network. Receiver picked up live FM broadcasts.
Designed and assembled a stepper motor controller for an EV concept car's steering column. Accepts input via CAN bus or USB COM port, converting to PWM for precise angle control.
PCB-based water sensor with analog ADC circuit on Raspberry Pi Pico W. Sends email alerts on detection and low battery. Sensors wire in parallel for multi-zone deployment.
DIY stock ticker using Raspberry Pi Pico W + WS2812B LED strip for ~$25 (vs $1000+ commercial options). Displays live price and % change in scrolling fashion from a hosted web UI.
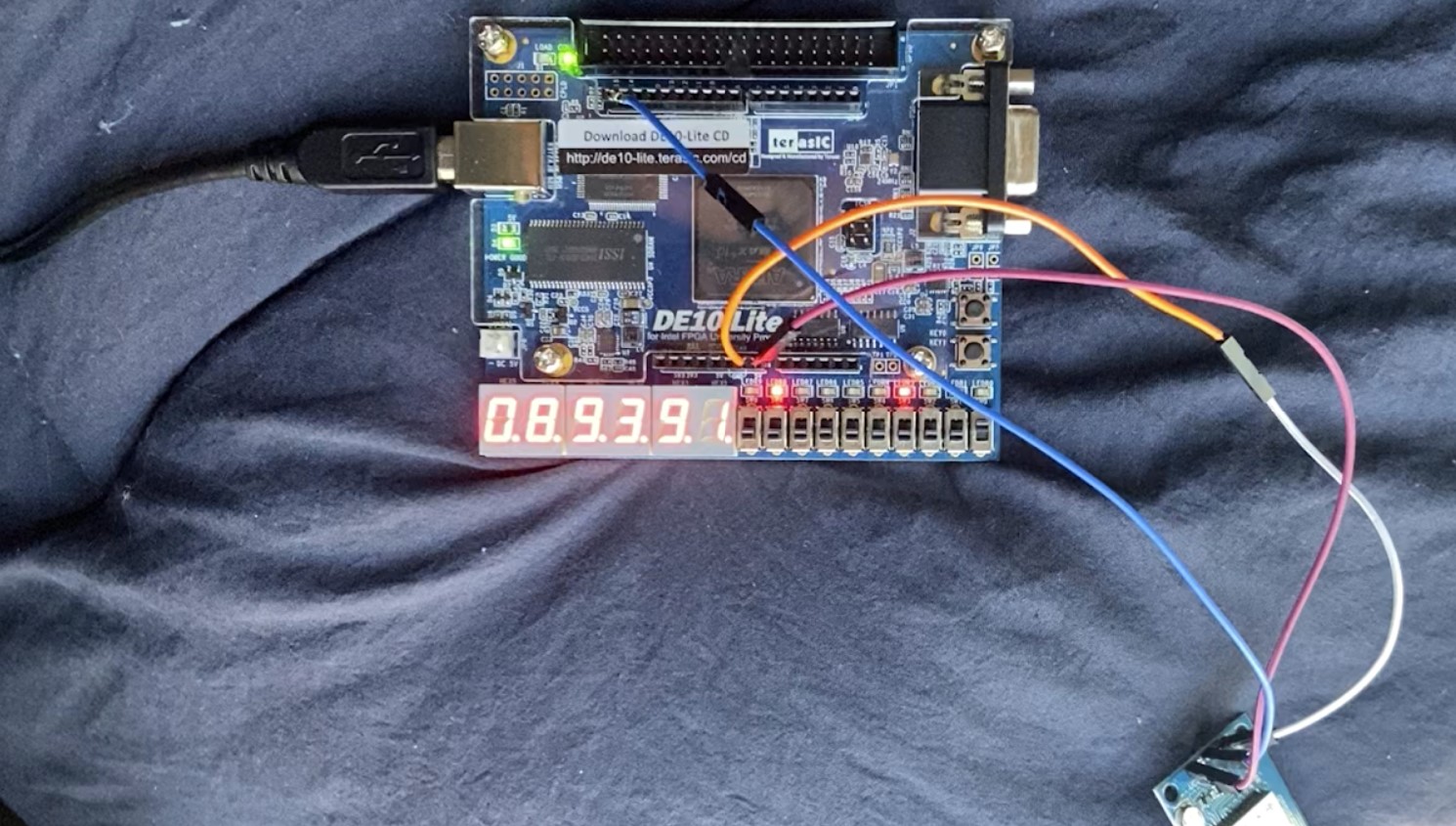
Implemented UART RX, NMEA parser, data storage, and VGA graphics driver in SystemVerilog on Intel FPGA. Enabled timestamped GPS location logging at 20-yard resolution with monitor display.
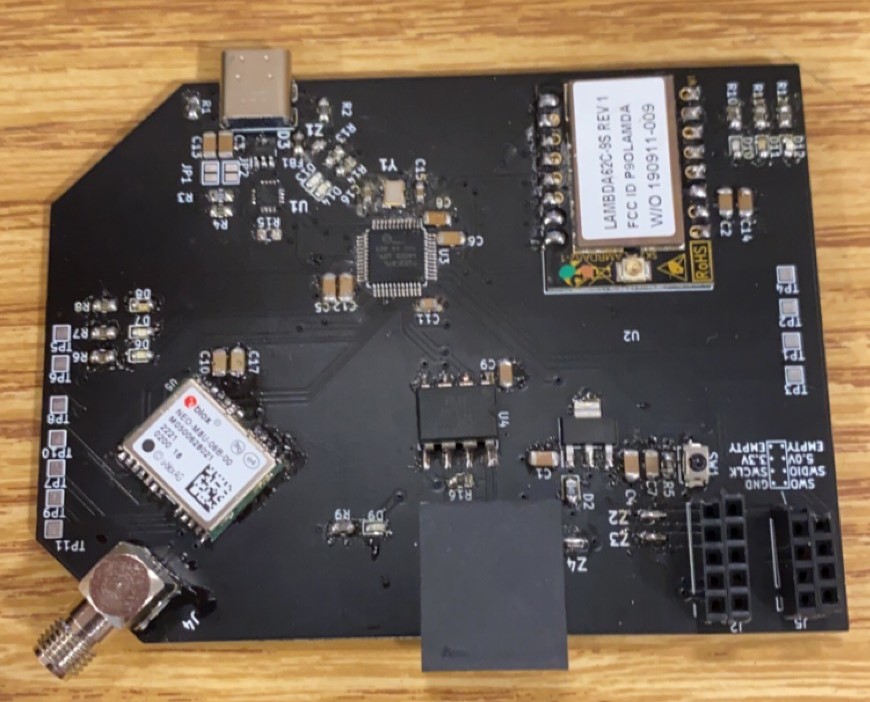
Designed a 4-layer PCB with GPS, LoRa, CAN transceiver, and USB-C around an STM32 MCU for real-time vehicle tracking, health monitoring, and remote control in the Shell Eco-Marathon.
PCB DesignRF EngineeringAutomotiveSTM32
Research Asst. · Sep 2022
Motion System for RF Testing
Designed a 2-axis automated motion system for RF signal integrity testing using Marlin firmware, Python/serial control, and 3D-printed custom parts. Used Ansys HFSS for validation.